A rail network utilized drone-based LiDAR survey to meet the high-quality land information required for feasibility assessment of elevated rail-cum-road corridor along the existing rail network
Indian city Bangalore (Bengaluru) in Karnataka state has witnessed a sharp rise in the volume of personalized vehicles in the last few years, overburdening the city’s road network and traffic management. South Western Railway (SWR), the Karnataka-headquartered railway zone of Indian Railways, explored the possibility of introducing/enhancing the commuter rail services (also called sub-urban train services) in Bengaluru, with minimum land acquisition.
Towards this end, SWR undertook an assessment of examining the feasibility of an elevated rail cum road project along the existing rail network.
Marvel Geospatial was entrusted with the execution of survey work for the feasibility study in SBC (South Bangalore City) area, through drone and LiDAR-based mapping.
2D and 3D mapping with drones and LiDAR
Marvel Geospatial undertook the survey and mapping (2D/3D) work for the newly proposed elevated rail cum road Project in Bangalore City Area, using drone (UAV) and LiDAR. The scope of the project was to produce digital ortho rectified imagery (ORI), digital elevation models (DEM), contours and specific plan metric features such as track, level crossings, bridges, limited height subways roads under bridges(RUBs), roads over the bridges(ROBs), flyovers, stations yard, platform circulating area, building structures and railway land boundary encroachment roads in digital formats.
The areas covered under the project were:
- Bangalore Station Yard
- Yashwanthpur – Bangalore City
- Bangalore City – Kengeri
- Bangalore City – Bangalore Cantonment
Workflow and geospatial technology adoption
An innovative geospatial technique was used to cover obscured or missing areas from the aerial view. The fusion of UAV LiDAR and portable scanners’ LiDAR resulted in excellent output as a hybrid point cloud.
Flight Planning – UAV: The drone survey was carried out in auto-pilot mode. Auto-Pilot helps to capture uniform images with the desired overlap for stereo view (3D view).

Drone flight planning
The drones were flown at an altitude of 70m, resulting in a resolution of 2 cm GSD (Ground Sampling Distance). A minimum overlap of 65% on the side lap and 75% on the front lap was maintained to get a good 3D model for a stereo view.

Drone survey
LiDAR Survey was done using Kaarta Stencil scanner, providing 2-3cm accuracy and up to 300,000 points per second. Real time point cloud generation was done with Kaarta Engine
Scan → Download → Done
A 360-degree Samsung camera was also mounted on the scanner, giving a high-quality (4K resolution) video output.
Merging point cloud data (PCD) with the smart merging method: Marvel Geospatial used innovative geospatial solutions for this railway project, generating a hybrid point cloud using UAV-generated LiDAR and mobile 3D scanner generated LiDAR.
Smart merging method was used for hybrid point cloud data, using UAV and LIDAR point cloud. PCD was generated through sparse reconstruction and dense reconstruction. The process of generating the PCD through the laser scanner was performed in the field with portable 3D scanners. The point cloud was obtained through UAV imagery 3D Reconstruction process.
To merge the PCD data, at least three target points and overlapping areas were required. The results from the merging and optimization obtained a 20 mm accuracy, which can be made more precise by optimization.
Point cloud data (PCD) was generated through sparse reconstruction and dense reconstruction. The process of generating the PCD through the laser scanner was performed in the field with portable 3D scanners. UAV imagery 3D Reconstruction process gave the point cloud. UAV point cloud combined with LiDAR Point Cloud gave complete coverage of the AOI.
To merge the PCD data, at least three target points and overlapping areas were required. The degree of overlap between the laser scanner and the PCD generated by the UAV needs to be at least 30% and the target point must be secured in this area. Merged data is then ready for feature classification and conversion to desired CAD formats.
The results from the merging and optimization obtained a 20 mm accuracy, which can be made more precise by optimization. It is also important to plan aerial photography early enough because the accuracy of the PCD increases with the angle and height at which the UAV takes the 2D aerial photographs.

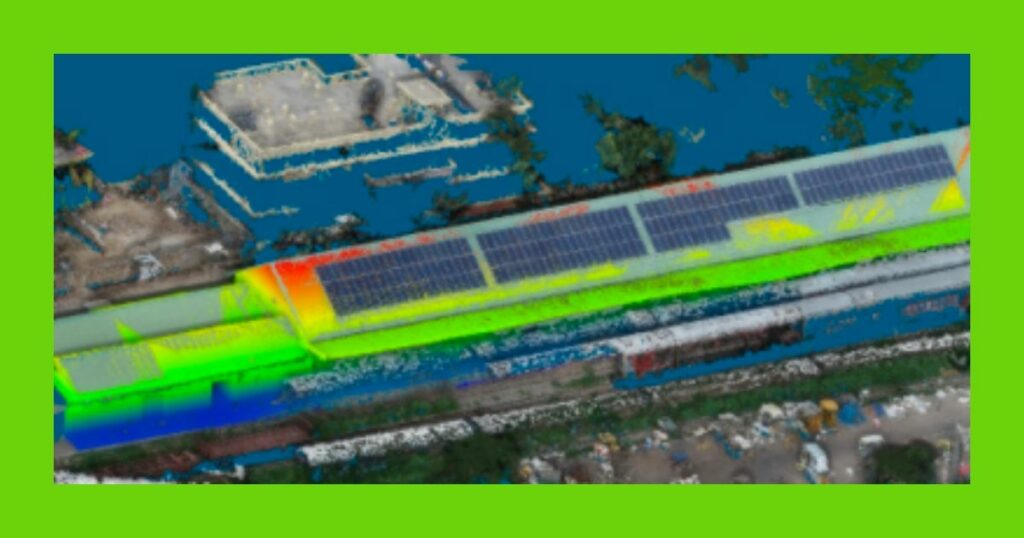
UAV + LiDAR point cloud

LiDAR data
Feature Extraction: Features were collected from 3D Stereo View. Layers classification was done with reference to South Western Railway Drawing templates. 2D features over ortho Imagery were collected. 3D Models were prepared for SBC Yard using LiDAR Point cloud and 3D Modeling Software (Auto CAD Civil 3D).

DEM data

Ortho imagery

Feature extraction from ortho imagery and point cloud
Drone and LiDAR advantage
Drone-based survey for this project yielded benefits like current, as-on-date imagery (ground information) for quick reference; easier survey of inaccessible locations; faster data acquisition and data processing; multiple data deliverables in short duration; higher data resolution and accurate data, and lower costs.
Further, with the combined use of drones and LiDAR, Marvel Geospatial was able to generate a hybrid point cloud using drone-generated LiDAR data and mobile 3D scanner-generated LiDAR data which gives an mm level accuracy. This method is feasible and cost-effective for large-scale infrastructure development projects.




